7.1 Katse Mootori kasutamine
Mootorid ja H-sild L293D
Eesmärk
Eelmises projektis kasutasime transistori, et kontrollida mootorit, millega suutsime kontrollida vaid mootori kiirust. Selles projektis võtame kasutusele H-silla, et saaksime kontrollida mootori pöörlemissuunda. Kuna tegemist on suure sammuga robotiehitusele, siis lisame skeemi lüliti, mis paneb mootori tööle, lüliti mis muudab pöörlemissuunda ja muuttakisti mootori kiiruse muutmiseks.
Vajalikud komponendid
- L293D või SN754410 mootori draiver
- lülitid 1 tk
- 10kOhm takistid 1 tk
- potentsiomeeter
- 18 Juhtmed;
- 9V Battery;
- 1 Breadboard Small ;
- 1 Arduino Uno R3.
H-sild
Et mootorit juhtida ühte ja teist pidi, oleks vaja muuta mootori klemmide polaarsust. Siinkohal aitab meid välja mootori draiver L293D (või SN754410). Tegemist on nelja kanalise mootori draiveriga, mis on mõeldud mootorite, releede või muude induktiivsete elektriseadmete juhtimiseks. Ehk selle abil on võimalik kontrollida kohte mootorit. Kiipi on sisse ehitatud kaitsedioodid, mis kaitsevad induktiivsusest tuleneva elektrilise tagasilöögi eest.
Kui lihtsustada L293D tööpõhimõtet, siis on tegemist nelja lülitiga, mis meenutab H-tähte ja sealt see nimi tulebki.
L293D
Mootori draiver L293D on kiip 16-jalaga.

Kiibi jalad on tavaliselt nummerdatud. Iga kiibi on ülemises osas lohk ja võta see ette nii, et lohk jääb üles. Number 1 jalg jääb üles vasakule ja jooksevad U-kujuliselt.

- Vss – kiibi toide +5V
- Vs – väline toide kuni +36V
- ENABLE1 ja ENABLE2 – aktiveerivad mootor1 ja mootor2
- INPUT1 ja INPUT2 – mootor1 juhtimiseks
- OUTPUT1 ja OUTPUT2 – mootor1 ühendamiseks
- INPUT3 ja INPUT4 – mootor2 juhtimiseks
- OUTPUT3 ja OUTPUT4 – mootor2 ühendamiseks
- GND – maandus
L293D ühendamine Arduinoga
Paneme siis mootorid praktilised mootori draiveri abiga tööle. Skeemi lisame kaks nuppu ja potentsiomeetri moodoti juhtumiseks.
Ühendame kõigepealt L293D kiibi, lüliti ja patarei juhtmed arendusplaadiga. Ära veel patareid kinnita. Seejärel ühendame arendusplaadi pluss ja miinus pikiribad omavahel. Edasi ühendame mootori draiveri järgmised viigud numbrite järgi. Jälgi, kuhu poole jääb kiibi lohk!
- 1. viik – ühendame Arduino pesasse 9
- 2. viik – ühendame Arduino pesasse 4
- 3. ja 6. viik – ühendame mootoriga
- 4., 5., 12. ja 13. viik – ühendame maandusega
- 7. viik – ühendame Arduino pesasse 3
- 8. ja 16. viik – ühendame patareid toitega
Ühendamise skeem:

Selline ühendus vastutab meil siis ühe mootori eest. Skeemis oleva lüliti ühendame aga Arduino pessa 2. Lisame koodijupi mootori juhtimiseks.
Kood:
int switchPin = 2; // lüliti 1
int motor1Pin1 = 3; // viik 2 (L293D)
int motor1Pin2 = 4; // viik 7 (L293D)
int enablePin = 9; // viik 1(L293D)
void setup() {
// sisendid
pinMode(switchPin, INPUT);
//väljundid
pinMode(motor1Pin1, OUTPUT);
pinMode(motor1Pin2, OUTPUT);
pinMode(enablePin, OUTPUT);
// aktiveeri mootor1
digitalWrite(enablePin, HIGH);
}
void loop() {
// kui lüliti on HIGH, siis liiguta mootorit ühes suunas:
if (digitalRead(switchPin) == HIGH)
{
digitalWrite(motor1Pin1, LOW); // viik 2 (L293D) LOW
digitalWrite(motor1Pin2, HIGH); // viik 7 (L293D) HIGH
}
// kui lüliti on LOW, siis liiguta mootorit teises suunas:
else
{ digitalWrite(motor1Pin1, HIGH); // viik 2 (L293D) HIGH
digitalWrite(motor1Pin2, LOW); // viik 7 (L293D) LOW
}
}
Kui skeem laaditakse, töötab mootor ühes suunas ja kui nuppu vajutatakse, siis teises suunas. Me täiendame seda veel ühe lülitusega, mis käivitab mootori ja potentsiomeetri, mis muudab mootori kiirust.
Vajalikud komponendid
- L293D või SN754410 mootori draiver
- lülitid 2tk
- 10kOhm takistid 2tk
- potentsiomeeter
- 9V Battery
- 23 Juhtmed
- Breadboard
- Arduino Uno
Ühendamise skeem:

Kood:
int switchPin = 2; // lüliti 1
int switchPin2 = 1; // lüliti 2
int potPin = A0; // potentsiomeeter
int motor1Pin1 = 3; // viik 2 (L293D)
int motor1Pin2 = 4; // viik 7 (L293D)
int enablePin = 9; // viik 1(L293D)
void setup() {
// sisendid
pinMode(switchPin, INPUT);
pinMode(switchPin2, INPUT);
//väljundid
pinMode(motor1Pin1, OUTPUT);
pinMode(motor1Pin2, OUTPUT);
pinMode(enablePin, OUTPUT);
}
void loop() {
//mootori kiirus
int motorSpeed = analogRead(potPin);
//aktiveeri mootor
if (digitalRead(switchPin2) == HIGH)
{
analogWrite(enablePin, motorSpeed);
}
else
{ analogWrite(enablePin, 0); }
// kui lüliti on HIGH, siis liiguta mootorit ühes suunas:
if (digitalRead(switchPin) == HIGH)
{
digitalWrite(motor1Pin1, LOW); // viik 2 (L293D) LOW
digitalWrite(motor1Pin2, HIGH); // viik 7 (L293D) HIGH
}
// kui lüliti on LOW, siis liiguta mootorit teises suunas:
else
{
digitalWrite(motor1Pin1, HIGH); // viik 2 (L293D) HIGH
digitalWrite(motor1Pin2, LOW); // viik 7 (L293D) LOW
}
}
Katse Kauguse mõõtmise anduri kasutamine
Ultraheli andur, mis mõõdab kaugust takistuseni
Ultrahelianduri HC-SR04 ühendamine Arduinoga
Ultraheli sensor on andur (sonar), mis mõõdab heliimpulsi abil kaugust eesoleva takistuseni. Nimelt mõõdetakse heliimpulsi saatmisest vastuvõtmiseni (kaja) kuluv aeg. Arvesse tuleb võtta veel heli levimise kiirus 340m/s ning tulemus jagada kahega.
Abiks: abiks: 1cm läbimiseks kulub 29μs. Signaali mõõtmiseks kasuta Arduino pulseIn() funktsiooni
Antud andur töötab 5V peal, mõõtenurk on kuni 15° ja mõõdetav distants 2-450cm. Tegemist on suhteliselt odava anduriga ning selle täpsus on 0,3cm.
Ühendamiseks Arduinoga ühendame Echo pesaga 8 ja Trig pesaga 7.
Komponendid:
- Ultrasonic Distance Sensor (4-pin);
- 4 Juhtmed;
- Breadboard
- Arduino Uno
Ühendamise skeem:

Kood:
#define ECHO_PIN 8
#define TRIG_PIN 7
void setup() {
pinMode(ECHO_PIN, INPUT);
pinMode(TRIG_PIN, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(TRIG_PIN,HIGH);
digitalWrite(TRIG_PIN,LOW);
int distance=pulseIn(ECHO_PIN, HIGH)/50;
Serial.println(distance);
}
--------------------------------------------------------------------------------------------------------------
#define ECHO_PIN 8
#define TRIG_PIN 7
void setup() {
pinMode(ECHO_PIN, INPUT);
pinMode(TRIG_PIN, OUTPUT);
Serial.begin(960);
}
void loop() {
Serial.println(measure());
}
int measure()
{
digitalWrite(TRIG_PIN,HIGH);
digitalWrite(TRIG_PIN,LOW);
int distance=pulseIn(ECHO_PIN, HIGH,15000)/50;
return constrain(distance,1,300);
}
Katse Lihtne parkimissüsteem
Ultraheli andur, Mootor, LED, Buzzer
Projekt mõõdab takistuse kaugust ultrahelianduri abil. Kui kaugus on väiksem kui 50, süttib punane LED, buzzer annab helisignaali ja mootori kiirus on 0.
Komponeendid:
- Kaugusemõõtmise andur
- Mootor
- Piezo
- LED
- 10 Juhtmed
Ühendamise skeem:

Kood:
#define ECHO_PIN 7
#define TRIG_PIN 8
int motorPin1=3;
int distance=1;
int LedPin=13;
int duration;
const int buzzerPin = 9;
void setup() {
pinMode(ECHO_PIN, INPUT);
pinMode(TRIG_PIN, OUTPUT);
pinMode(motorPin1,OUTPUT);
pinMode(LedPin,OUTPUT);
pinMode(buzzerPin, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(TRIG_PIN,LOW);
delay(200);
digitalWrite(TRIG_PIN,HIGH);
delay(200);
digitalWrite(TRIG_PIN,LOW);
duration = pulseIn(ECHO_PIN, HIGH);
distance=duration/58;
Serial.println(distance);
if (distance>50)
{
analogWrite(motorPin1,100);
digitalWrite(LedPin,0);
noTone(buzzerPin);
delay(1000);}
else
{
analogWrite(motorPin1,0);
digitalWrite(LedPin,250);
tone(buzzerPin, 1000);
}
}
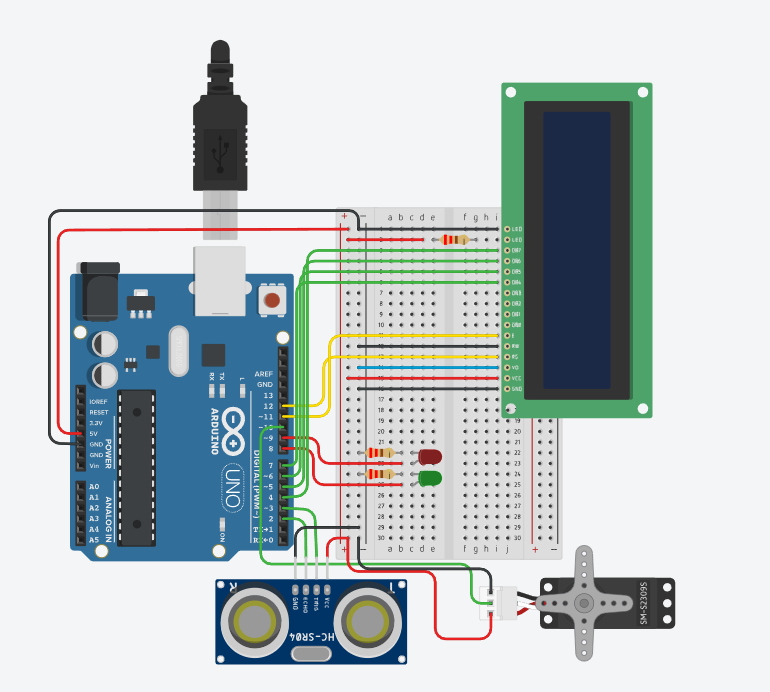
Prügikast
Komponeendid:
- 1 — Arduino Uno
- 1 — Breadboard
- 1 — Ultraheli sensor
- 1 — Servo mootor (Micro Servo)
- 1 — 1602 LCD ekraan
- 1 — potentsiomeeter
- 3 — Resistor
- 2 — LED
- 23 — juhtmed
Töö põhimõte:
- Ultraheli andur mõõdab kaugust, et avada prügikasti kaas.
- Kui saavutate 20 cm kauguse, avaneb kate servomootori abil.
- Kaugus ja staatus kuvatakse LCD ekraanil
Tinkerkadi skeem:
Skeem: https://www.tinkercad.com/things/gdOVxyaVr2a-prugikast?sharecode=HL7PdCtUwY0jli8VfYtIRUz8xRxmcEvOqofNQvBVVdw
Video: https://drive.google.com/file/d/1_xjNUjSHSszQCx2u8oWaatXsZxNEMO1_/view?usp=drivesdk
Kood:
#include <LiquidCrystal.h>
#include <Servo.h>
#define ECHO_PIN 2
#define TRIG_PIN 3
Servo servo1;
LiquidCrystal lcd(12, 11, 7, 6, 5, 4);
float distance;
int GREEN = 8;
int RED = 9;
void setup()
{
lcd.begin(16, 2);
pinMode(ECHO_PIN, INPUT);
pinMode(TRIG_PIN, OUTPUT);
pinMode(RED, OUTPUT);
pinMode(GREEN, OUTPUT);
servo1.attach(10);
Serial.begin(9600);
}
void loop()
{
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
unsigned long duration = pulseIn(ECHO_PIN, HIGH);
distance = duration * 0.0342 / 2;
Serial.println(distance);
String distance_cm = String(distance);
if (distance < 20)
{
servo1.write(180);
digitalWrite(RED, LOW);
digitalWrite(GREEN, HIGH);
lcd.setCursor(1, 0);
lcd.print("Kaugus: ");
lcd.setCursor(9, 0);
lcd.print(distance_cm);
lcd.setCursor(4, 1);
lcd.print("Lahti");
delay(1000);
}
else if (distance > 21)
{
servo1.write(0);
digitalWrite(RED, HIGH);
digitalWrite(GREEN, LOW);
lcd.setCursor(1, 0);
lcd.print("Kaugus: ");
lcd.setCursor(9, 0);
lcd.print(distance_cm);
lcd.setCursor(4, 1);
lcd.print("Kinni");
delay(1000);
}
}