Potentsiomeetri kasutamine
Komponeendid:

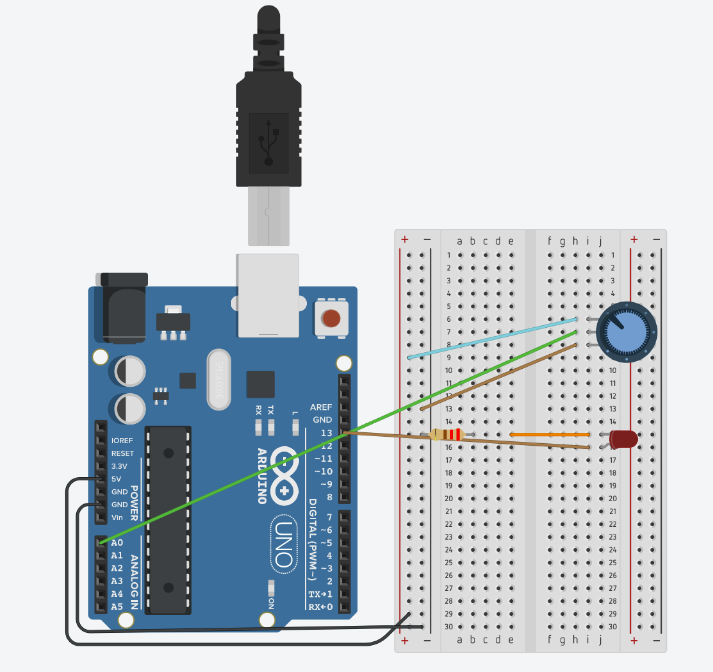
Ühendamise skeem:
Kõigepealt tuleb paigutada LED ja potentsiomeeter maketeerimislauale ja ühendada need, sarnaselt joonisel kujutatule arendusplaadiga. LED vilgutamise kiiruse reguleerimiseks kasutatakse potentsiomeetrit.
int sensorPin = 0;
int ledPin = 13;
int sensorValue = 0;
void setup()
{
pinMode(ledPin, OUTPUT);
Serial.begin(9600);
}
void loop() {
sensorValue = analogRead(sensorPin); // loeb analoog sisendi väärtust ja saadab tagasi täisarvu vahemikus 0 kuni 1023. See tähendab 10 bitilist täpsust (2^10 = 1024).
digitalWrite(ledPin, HIGH);
delay(sensorValue);
digitalWrite(ledPin, LOW);
delay(sensorValue);
float voltage = sensorValue * (5.0 / 1023.0); // konverteerime väärtuse (0 – 1023) ja tagastab (0 – 5V):
Serial.println(voltage); // Saadud tulemused kirjutame Serial Monitori.
}
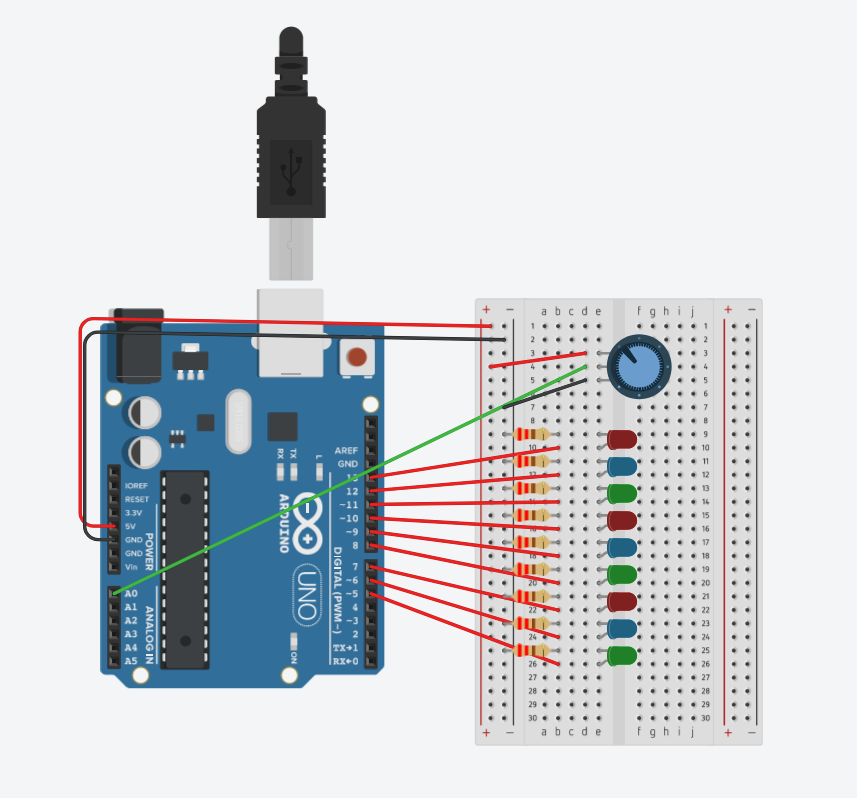
Praktiline töö 2 – Valguskett
https://www.tinkercad.com/things/ei5XJ1aip3q-cool-blorr-bojo
https://drive.google.com/file/d/1UGmzjD-1joSwA2wENU-V_RLhGpvivUTS/view
Komponendid:
- Arudino Uno
- Takisti (9)
- Juhtmed (14)
- 9 värvilist LEDi
- Potentsiomeeter
Garlandil on 5 vilkumisrežiimi, režiime vahetatakse potentsiomeetri abil
delay() — määrab viivituse
pinMode()
Seadistab määratud viigu käituma kas sisendi või väljundina.
digitalWrite()
Kirjutage digitaalsele kontaktile HIGH või LOW väärtus.
Kui viik on konfigureeritud INPUT-na, siis digitalWrite() lubab (HIGH) või keelab (LOW) sisendviigu sisemise tõmbamise.
int SensorPin=0;
int ledred1=13;
int ledblue1=12;
int ledgreen1=11;
int ledred2=10;
int ledblue2=9;
int ledgreen2=8;
int ledred3=7;
int ledblue3=6;
int ledgreen3=5;
int Sensorvalue = 0;
int Value;
void setup()
{
pinMode(ledred1,OUTPUT);
pinMode(ledred2,OUTPUT);
pinMode(ledred3,OUTPUT);
pinMode(ledblue1,OUTPUT);
pinMode(ledblue2,OUTPUT);
pinMode(ledblue3,OUTPUT);
pinMode(ledgreen1,OUTPUT);
pinMode(ledgreen2,OUTPUT);
pinMode(ledgreen3,OUTPUT);
}
void loop()
{
Value = analogRead(SensorPin);
Value = map(Value,0,1023,1,6);
Value = constrain(Value,1,6);
if (Value==1)
{
first();
}
else if(Value == 2)
{
second();
}
else if(Value == 3)
{
third();
}
else if(Value == 4)
{
fourth();
}
else if(Value == 5)
{
fifth();
}
else
{
digitalWrite(ledred1, LOW);
digitalWrite(ledred2, LOW);
digitalWrite(ledred3, LOW);
digitalWrite(ledblue1, LOW);
digitalWrite(ledblue2, LOW);
digitalWrite(ledblue3, LOW);
digitalWrite(ledgreen1, LOW);
digitalWrite(ledgreen2, LOW);
digitalWrite(ledgreen3, LOW);
}
}
void first()
{
digitalWrite(ledgreen1, LOW);
digitalWrite(ledgreen2, LOW);
digitalWrite(ledgreen3, LOW);
digitalWrite(ledred1, HIGH);
digitalWrite(ledred2, HIGH);
digitalWrite(ledred3, HIGH);
delay(150);
digitalWrite(ledred1, LOW);
digitalWrite(ledred2, LOW);
digitalWrite(ledred3, LOW);
digitalWrite(ledblue1, HIGH);
digitalWrite(ledblue2, HIGH);
digitalWrite(ledblue3, HIGH);
delay(150);
digitalWrite(ledblue1, LOW);
digitalWrite(ledblue2, LOW);
digitalWrite(ledblue3, LOW);
digitalWrite(ledgreen1, HIGH);
digitalWrite(ledgreen2, HIGH);
digitalWrite(ledgreen3, HIGH);
delay(150);
}
void second()
{
digitalWrite(ledgreen3, LOW);
digitalWrite(ledred1, HIGH);
delay(60);
digitalWrite(ledred1, LOW);
digitalWrite(ledblue1, HIGH);
delay(60);
digitalWrite(ledblue1, LOW);
digitalWrite(ledgreen1, HIGH);
delay(60);
digitalWrite(ledgreen1, LOW);
digitalWrite(ledred2, HIGH);
delay(60);
digitalWrite(ledred2, LOW);
digitalWrite(ledblue2, HIGH);
delay(60);
digitalWrite(ledblue2, LOW);
digitalWrite(ledgreen2, HIGH);
delay(60);
digitalWrite(ledgreen2, LOW);
digitalWrite(ledred3, HIGH);
delay(60);
digitalWrite(ledred3, LOW);
digitalWrite(ledblue3, HIGH);
delay(60);
digitalWrite(ledblue3, LOW);
digitalWrite(ledgreen3, HIGH);
delay(60);
}
void third()
{
digitalWrite(9, LOW);
digitalWrite(5, HIGH);
digitalWrite(13, HIGH);
delay(100);
digitalWrite(5, LOW);
digitalWrite(13, LOW);
digitalWrite(6, HIGH);
digitalWrite(12, HIGH);
delay(100);
digitalWrite(6, LOW);
digitalWrite(12, LOW);
digitalWrite(7, HIGH);
digitalWrite(11, HIGH);
delay(100);
digitalWrite(7, LOW);
digitalWrite(11, LOW);
digitalWrite(8, HIGH);
digitalWrite(10, HIGH);
delay(100);
digitalWrite(8, LOW);
digitalWrite(10, LOW);
digitalWrite(9, HIGH);
delay(100);
}
void fourth()
{
digitalWrite(5, HIGH);
digitalWrite(6, HIGH);
digitalWrite(7, HIGH);
digitalWrite(8, HIGH);
digitalWrite(9, HIGH);
digitalWrite(10, HIGH);
digitalWrite(11, HIGH);
digitalWrite(12, HIGH);
digitalWrite(13, HIGH);
delay(200);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
digitalWrite(12, LOW);
digitalWrite(13, LOW);
delay(200);
}
void fifth()
{
digitalWrite(ledgreen3, LOW);
digitalWrite(ledblue1, LOW);
digitalWrite(ledred2, LOW);
digitalWrite(ledred1, HIGH);
digitalWrite(ledgreen1, HIGH);
digitalWrite(ledblue2, HIGH);
delay(200);
digitalWrite(ledred1, LOW);
digitalWrite(ledblue2, LOW);
digitalWrite(ledgreen1, LOW);
digitalWrite(ledblue1, HIGH);
digitalWrite(ledgreen2, HIGH);
digitalWrite(ledred2, HIGH);
delay(200);
digitalWrite(ledblue1, LOW);
digitalWrite(ledgreen2, LOW);
digitalWrite(ledred2, LOW);
digitalWrite(ledgreen1, HIGH);
digitalWrite(ledblue2, HIGH);
digitalWrite(ledred3, HIGH);
delay(200);
digitalWrite(ledgreen1, LOW);
digitalWrite(ledblue2, LOW);
digitalWrite(ledred3, LOW);
digitalWrite(ledred2, HIGH);
digitalWrite(ledgreen2, HIGH);
digitalWrite(ledblue3, HIGH);
delay(200);
digitalWrite(ledred2, LOW);
digitalWrite(ledgreen2, LOW);
digitalWrite(ledblue3, LOW);
digitalWrite(ledblue2, HIGH);
digitalWrite(ledred3, HIGH);
digitalWrite(ledgreen3, HIGH);
delay(200);
digitalWrite(ledblue2, LOW);
digitalWrite(ledred3, LOW);
digitalWrite(ledgreen3, LOW);
digitalWrite(ledgreen2, HIGH);
digitalWrite(ledblue3, HIGH);
digitalWrite(ledred1, HIGH);
delay(200);
digitalWrite(ledgreen2, LOW);
digitalWrite(ledblue3, LOW);
digitalWrite(ledred1, LOW);
digitalWrite(ledred3, HIGH);
digitalWrite(ledgreen3, HIGH);
digitalWrite(ledblue1, HIGH);
delay(200);
digitalWrite(ledred3, LOW);
digitalWrite(ledgreen3, LOW);
digitalWrite(ledblue1, LOW);
digitalWrite(ledblue3, HIGH);
digitalWrite(ledred1, HIGH);
digitalWrite(ledgreen1, HIGH);
delay(200);
digitalWrite(ledblue3, LOW);
digitalWrite(ledred1, LOW);
digitalWrite(ledgreen1, LOW);
digitalWrite(ledgreen3, HIGH);
digitalWrite(ledblue1, HIGH);
digitalWrite(ledred2, HIGH);
delay(200);
}